1. Introduction
Electrochemical Impedance Spectroscopy (EIS) is a very complex subject in electroanalytical chemistry. This article is designed to help scientists understand what EIS is, how it works, and why EIS is a powerful technique. To understand electrochemical impedance spectroscopy, we will start with the concept of electrical resistance via Ohm’s law (Equation 1), where 


 (1)
(1)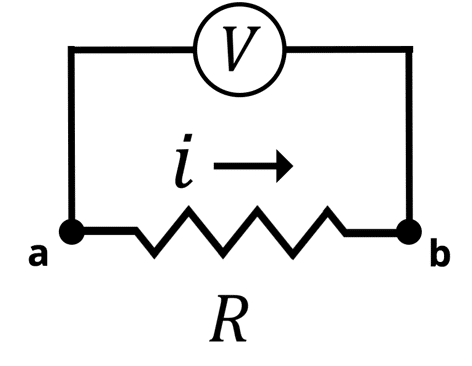
Circuit Diagram of Ohm’s Law. The Voltage (V) is applied between points (a) and (b). The current (i) flows across the resistor (R)
This description of resistance via Ohm’s law applies specifically to direct current (DC), where a static voltage or current is applied across a resistor. Impedance, by contrast, is a measure of the resistance a circuit experiences related to the passage of an alternating electrical current (AC). In an AC system, the applied signal is no longer static but oscillates as a sinusoidal wave at a given frequency. The equation for impedance is analogous to Ohm’s law; however, instead of using 
 (2)
(2)The impedance 




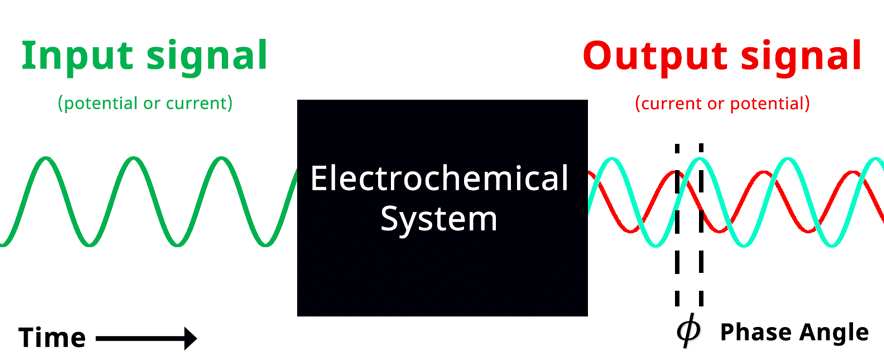
With a conceptual understanding of impedance, we can look at electrochemical impedance spectroscopy as an electroanalytical technique. In an EIS experiment, a potentiostat applies a sinusoidal potential (or current) signal to an electrochemical system and the resulting current (or potential) signal is recorded and analyzed (see Figure below).

Simplified Electrochemical Impedance Spectroscopy Diagram. If the input signal is potential, then the green wave represents the input sinusoidal potential signal and the red wave represents the output sinusoidal current.
If the applied signal is potential and the measured signal is current, it is referred to as “potentiostatic EIS.” When the applied signal is current and the measured signal is potential, it is referred to as “galvanostatic EIS.” For the case of potentiostatic EIS, a potential is applied with the form shown (Equation 3).
 (3)
(3)where 





 (4)
(4)
Simplified Electrochemical Impedance Spectroscopy Diagram with Phase Angle. The teal sinusoidal wave represents input potential signal visually overlapped in time with the output current signal. Phase angle represents the shift in phase when the input and output signals are overlapped in time
A complete EIS experiment consists of a sequence of sinusoidal potential signals centered around a potential setpoint. The amplitude of each sinusoidal signal remains constant, but the frequency of the input signal will vary. Typically, frequencies of each input signal are equally spaced on a descending logarithmic scale from ~10 kHz – 1 MHz to a lower limit of ~10 mHz – 1 Hz. For each input potential, a corresponding output current is measured at a given frequency.
Visualization of EIS experiment. The applied input signal and measured output signal have the same frequency. Click to view animation!
The result of plotting the input and output signals on a single current vs. potential graph is called a Lissajous plot (see Figures below). The shape of the current vs. potential Lissajous plot is a straight line (see Figure below) if the input and output signals are in-phase, or if 
Lissajous plot where the input potential and output current are perfectly in phase. The resulting curve is a straight line with a slope proportional to the impedance at that frequency.
Lissajous plot where the input potential and output current are out of phase. The resulting plot is an oval.
2. Electrochemical Impedance Spectroscopy Data and Plotting
Once the potentiostat collects the potential vs. time and the current vs. time data at each frequency, a Fast Fourier Transform (FFT) is applied to the data. The FFT converts the potential vs. time and current vs. time into potential magnitude vs. frequency and current magnitude vs. frequency.
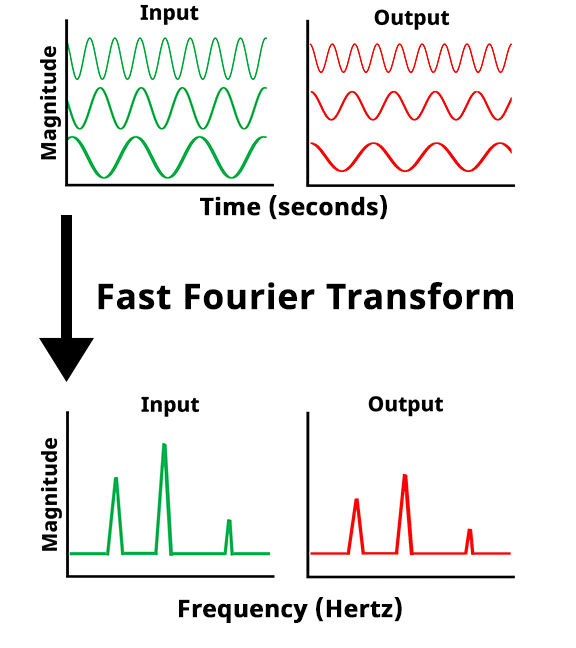
Fast Fourier Transform (FFT) of potential and current vs time data to potential and current magnitude vs frequency data
The potential amplitude (
The magnitude of the impedance is equal to the potential amplitude
 (5)
(5)If we plot the magnitude of the impedance 
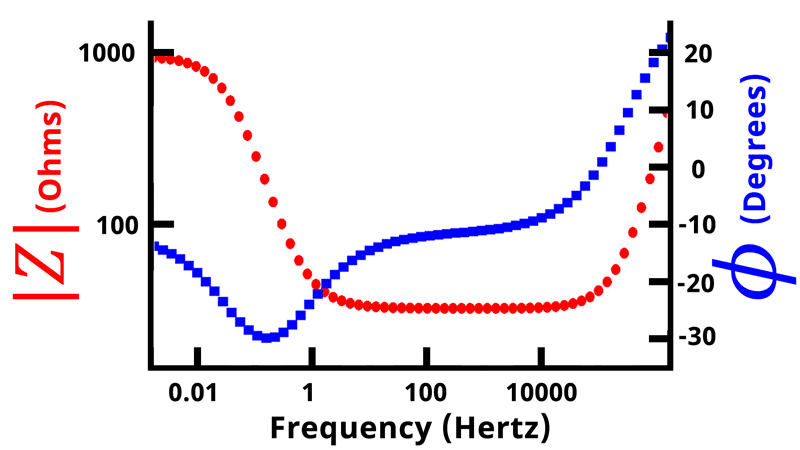
Sample Bode Plot
In a Bode plot,
There is another way to express EIS data. Using polar coordinates, let us plot
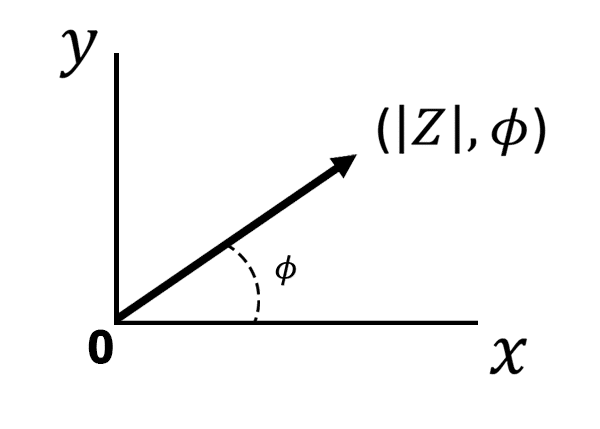
Plotting of Impedance Magnitude and Phase Angle in Polar Coordinates
If we move from polar to cartesian coordinates, we can break the impedance magnitude into its x and y components (see Figure below).
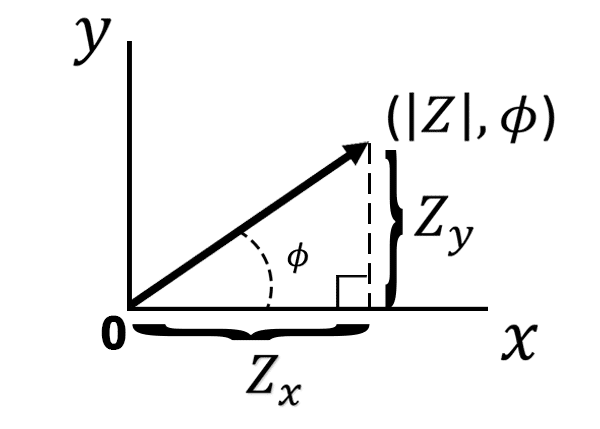
Expressing the Impedance Magnitude in terms of x and y components
Using trigonometry we can describe the impedance of the x-axis 

 (6)
(6) (7)
(7)The
 (8)
(8)The impedance associated with the x-axis is referred to as the real impedance (


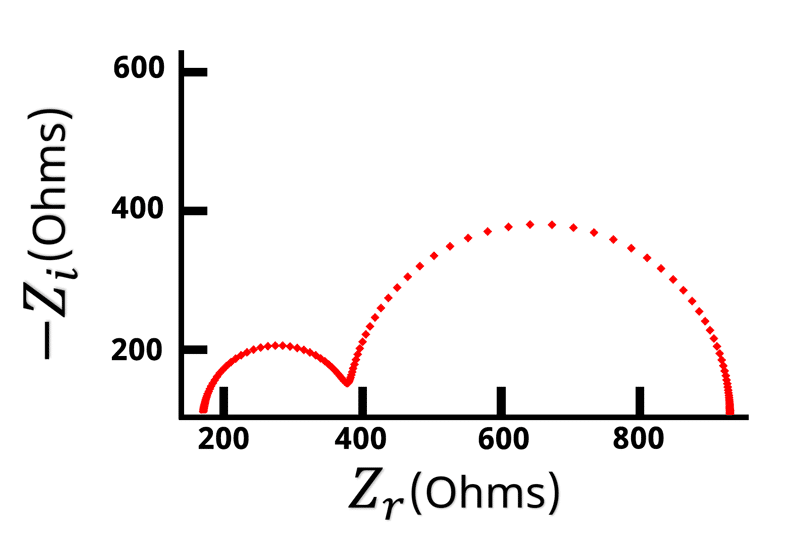
Sample Nyquist Plot
The imaginary impedance values on a Nyquist plot are commonly inverted as shown in the figure above. Alternatively, the
Nyquist plots are the most common form of displaying impedance data, followed by Bode plots. Bode plots allow easy determination of frequency values, compared with Nyquist plots where frequency values are not plotted. Generally, the lower-leftmost points on a Nyquist plot correspond to the highest frequencies, and following the trace to the right moves from high to low frequency. In total, an electrochemical impedance spectroscopy experiment results in five columns of data:
3. How to use Electrochemical Impedance Spectroscopy
This section of the article deals with how one models the EIS response with an equivalent circuit and how one solves the model to extract meaningful data from an EIS experiment.
3.1. Circuit Modeling
Electrochemical impedance spectroscopy can be used to extract useful information about complex electrochemical systems. The different parts of an electrochemical system can be modeled by known circuit elements, where the impedance is well-characterized. Below you can find a table (see Table below) of known circuit elements and the equations that describes their respective impedances.
(R)


(C)

(L)

(CPE, Q)

(W, Ws, Wo)

(G)

Note that we use 

To understand how we might model an electrochemical system, let us consider a 3-electrode configuration where a conductive working electrode is submerged in an aqueous electrolyte with a redox-active molecule as the analyte (see Figure below). While not shown in this figure, a counter (auxiliary) electrode to maintain charge balance and a reference electrode to act as a stable reference point are implied in the system. The working, counter, and reference electrodes are all connected to a potentiostat. To learn more about how a potentiostat operates in such a configuration, please review our Knowledgebase article on how a potentiostat works.
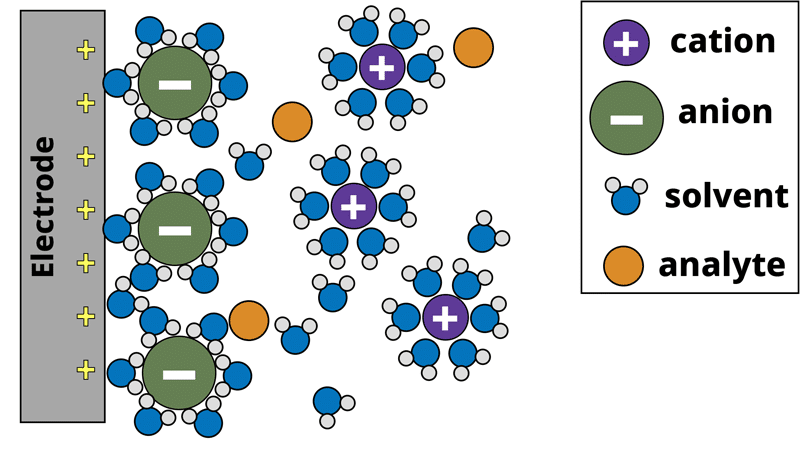
Model of electrode surface in a 3-electrode aqueous system. The gray working electrode applies a positive potential that attracts the negatively charged anions to the surface, forming the electrochemical double-layer.
In the electrochemical system, the potentiostat applies a positive bias to the working electrode with respect to the reference electrode. The positive charge from the working electrode attracts the negatively charged anions to the working electrode surface. The anions are solvated by solvent molecules, and when the anion reaches the electrode surface the solvent molecules surrounding the anion make contact with the electrode surface. This forms a type of capacitor at the electrode surface. A capacitor consists of two oppositely charged plates separated by a dielectric material. In our electrochemical system, the positive charge from the electrode surface is one plate, solvent molecules form the dielectric, and the negatively charged anions form the other plate. This is known as the electrochemical double-layer. The electrochemical system also consists of analyte molecules diffusing around the electrode surface. If we apply a sufficiently positive potential to the working electrode, we can induce an electron transfer (oxidation) from the analyte to the electrode surface. Recall Ohm’s law (Equation 1), where a resistor can be thought of as a measure of the additional potential needed to drive current through a circuit. Similar to Ohm’s law, the electron transfer process can be modeled between the analyte and the electrode as a resistor. Lastly, beyond the electrode surface is the bulk solution where the counter and reference electrodes are located. The electrolyte solution is not a perfect conductor of charge and as such, there is solution resistance between the electrodes as well, which can be modeled as another separate resistor.
At this point, we can construct a simple circuit to describe the electrochemical system. This circuit is commonly used in circuit modeling and is referred to as a Randles circuit (see Figure below),
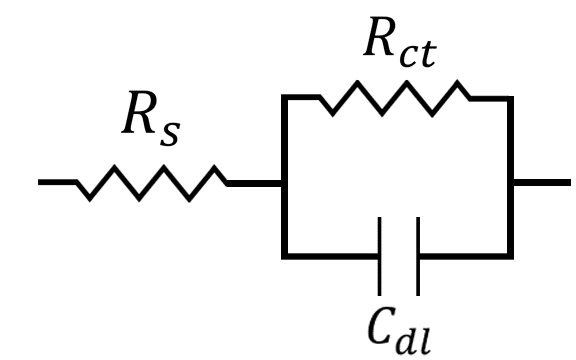
Randles Circuit
where 


3.2. Solving the Circuit Model
According to Kirchhoff’s circuit laws, the total impedance of two circuit elements in series is equal to the sum of the two impedances,
 (9)
(9)Conversely, the reciprocal of the total impedance of two circuit elements in parallel is equal to the sum of the reciprocal of each impedance,
 (10)
(10)Equation 10 can be rearranged,
 (11)
(11)Therefore, the total impedance of our Randles circuit (see Figure above) can be calculated by substituting each circuit element and combining Equation 9, Equation 10, and Equation 11:
 (12)
(12)Substituting the respective impedance equations from the Table above for each circuit element results in,
 (13)
(13)After rearranging and simplifying this equation, the impedance of the electrochemical system can be described as
 (14)
(14)Remember that 



Therefore, at high frequency the capacitor becomes the path of least resistance (see Figure below).
When the frequency of our applied potential is very small, or when 


Alternative current paths during an EIS experiment. At high frequency, the impedance through the capacitor becomes small, and current travels through the capacitor Cdl. At low frequency, the impedance of the capacitor becomes large and current travels through the resistor Rct.
The Nyquist plot of a Randles circuit can be seen below. When a resistor and capacitor are in parallel, they form a semicircle on the Nyquist plot. Recall that the frequency isn’t directly shown in the Nyquist plot, but typically frequency increases from right to left.
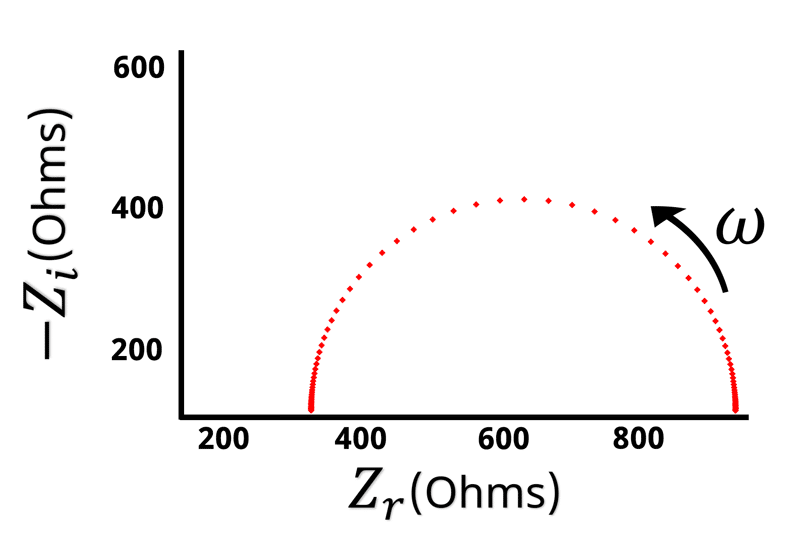
Nyquist plot of Randles Circuit. The frequency typically increases from right to left.
With our understanding of how the impedance behaves at high and low frequencies, values for
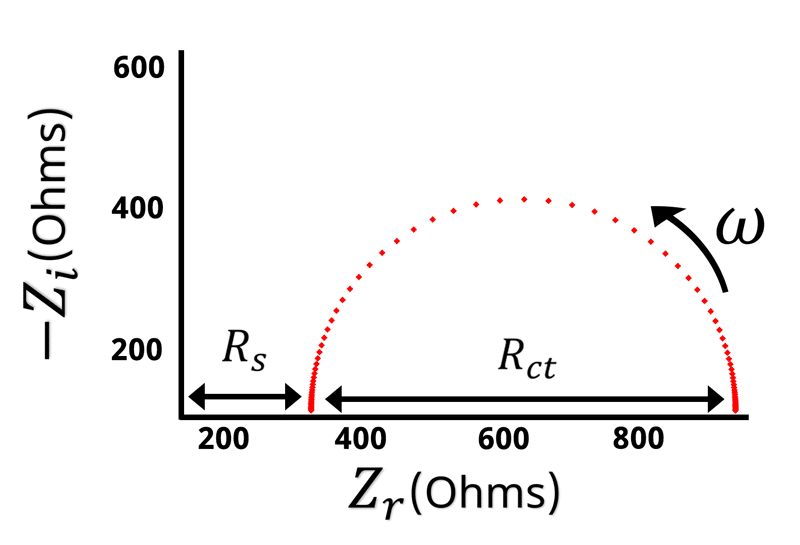
Nyquist plot with Rs and Rct labeled on the x-axis
Remember that when 
The simple Randles circuit above is a fairly common system, but to model more complex electrochemical systems, advanced EIS fitting software is required.
3.3. Why is Electrochemical Impedance Useful?
With a basic understanding of electrochemical impedance spectroscopy, how the technique works, how data is presented, and analyzing EIS data from a simple electrochemical system, the question arises: why use EIS? The double-layer capacitance and solution resistance in an electrochemical system can be determined using DC voltammetry methods. What is special about EIS?
The power of electrochemical impedance spectroscopy is in its ability to probe electrochemical processes on different time scales. This is a unique feature of AC-based electrochemical methods as compared to DC-based electrochemical methods (like cyclic voltammetry). EIS is capable of probing electrochemical processes that might be happening at the same time but on different time scales. For example, the charging of the electrochemical double-layer usually occurs on the microseconds time scale, but diffusion typically occurs on the hundreds of milliseconds time scale. During a DC-based experiment, both processes are happening at the same time and they both contribute to the total current measured. However, it might be difficult to deconvolute the current response from those two processes in a DC-based experiment. EIS, by contrast, can apply a frequency on the time-scale of each process.
The Randles circuit consists of a resistor and a capacitor in parallel, and that circuit is occasionally characterized by its RC time constant. An RC time constant 
The Randles circuit example in this article is one of the simplest circuit models for an electrochemical system. More complex systems require more complex circuit models. Solving such a circuit model usually requires advanced circuit fitting software and fitting the circuit model provides quantitative information about the electrochemical system. Pine Research Instrumentation offers such software,
and we encourage you to download it and use the built-in circuit fitting tools to analyze your EIS data.
Electrochemical impedance spectroscopy is a complicated electroanalytical chemistry technique. This article serves as an introduction to the technique. There are many other aspects of electrochemical impedance spectroscopy that are not covered in this article; however, some are discussed in other Knowledgebase articles on our website.
4. Related Video
The following YouTube video provides a short introduction to electrochemical impedance spectroscopy, and can be found along with other useful content on the Pine Research YouTube channel.
